PINNs: Hard and Soft Constraints for 2D Heat Equations
Solving the 2D Heat Equation using Physics-Informed Neural Networks (PINNs)
In this notebook, we demonstrate how to solve the 2D time-dependent heat equation using a Physics-Informed Neural Network (PINN). Unlike traditional machine learning models that rely heavily on large datasets, PINNs embed physical laws (PDEs) directly into the loss function.
We solve the following PDE:
\[\frac{\partial u}{\partial t} = \alpha \left( \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} \right)\]on the domain \( (x, y, t) \in [0,1]^2 \times [0,1] \), with:
- Initial condition: \( u(x, y, 0) = \sin(\pi x)\sin(\pi y) \)
- Boundary condition: \( u = 0 \) on all edges
- Thermal diffusivity: \( \alpha = 0.01 \)
We will train a neural network to approximate the solution \( u(x, y, t) \), guided by both sparse data and physics.
1
2
3
4
5
6
7
8
9
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# Activate GPU
device = torch.device("mps" if torch.mps.is_available() else "cpu")
print(f"Using device: {device}")
1
Using device: cpu
Neural Network Architecture
We define a fully connected feedforward neural network FCNet to approximate the solution \( u(x, y, t) \). The network takes a 3D input (\(x, y, t\)) and outputs a scalar \( u \).
We use multiple hidden layers with the Tanh activation function, which works well for approximating smooth functions like PDE solutions.
1
2
3
4
5
6
7
8
9
10
11
12
13
# Fully Connected Neural Network
class FCNet(nn.Module):
def __init__(self, layers):
super().__init__()
net = []
for i in range(len(layers) -2):
net.append(nn.Linear(layers[i], layers[i+1]))
net.append(nn.Tanh())
net.append(nn.Linear(layers[-2], layers[-1]))
self.model = nn.Sequential(*net)
def forward(self, x):
return self.model(x)
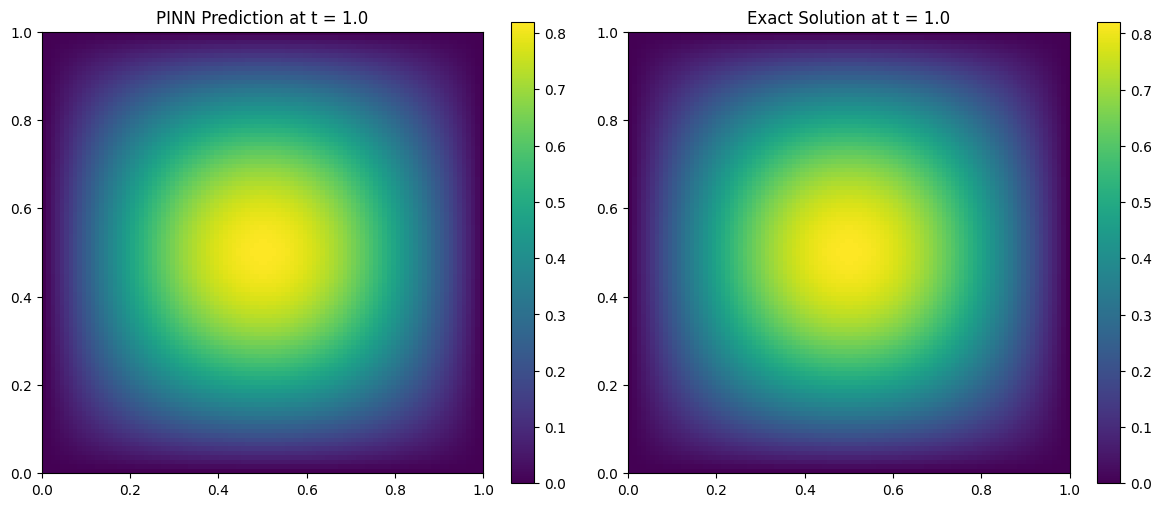
Enforcing Boundary Conditions with a Hard Constraint
Instead of penalizing non-zero values at the boundary, we modify the network output to satisfy the condition exactly:
\[u(x, y, t) = x(1 - x)y(1 - y) \cdot \text{NN}(x, y, t)\]This guarantees that ( u = 0 ) on all edges of the domain, satisfying the Dirichlet boundary condition by design.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
class HardBCNet(nn.Module):
def __init__(self, layers):
super().__init__()
net = []
for i in range(len(layers) - 2):
net.append(nn.Linear(layers[i], layers[i+1]))
net.append(nn.Tanh())
net.append(nn.Linear(layers[-2], layers[-1]))
self.model = nn.Sequential(*net)
def forward(self, xyt):
x = xyt[:, 0:1]
y = xyt[:, 1:2]
t = xyt[:, 2:3]
u_nn = self.model(torch.cat([x, y, t], dim=1))
mask = x * (1 - x) * y * (1 - y) # zero on domain edges
return mask * u_nn
1
2
model = FCNet([3, 64, 64, 64, 1])
print(model)
1
2
3
4
5
6
7
8
9
10
11
FCNet(
(model): Sequential(
(0): Linear(in_features=3, out_features=64, bias=True)
(1): Tanh()
(2): Linear(in_features=64, out_features=64, bias=True)
(3): Tanh()
(4): Linear(in_features=64, out_features=64, bias=True)
(5): Tanh()
(6): Linear(in_features=64, out_features=1, bias=True)
)
)
1
2
model = HardBCNet([3, 128, 128, 128, 1])
print(model)
1
2
3
4
5
6
7
8
9
10
11
HardBCNet(
(model): Sequential(
(0): Linear(in_features=3, out_features=128, bias=True)
(1): Tanh()
(2): Linear(in_features=128, out_features=128, bias=True)
(3): Tanh()
(4): Linear(in_features=128, out_features=128, bias=True)
(5): Tanh()
(6): Linear(in_features=128, out_features=1, bias=True)
)
)
Sampling Training Points
We divide our training data into three categories:
- Collocation (interior) points: Random points in the full space-time domain \( [0,1]^2 \times [0,1] \). These are used to enforce the PDE.
- Boundary points: Points where either \( x = 0, x = 1 \) or \( y = 0, y = 1 \). These enforce Dirichlet boundary conditions.
- Initial condition points: Points at \( t = 0 \). These enforce the known initial state of the system.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
# 1 Collocation / Interior points: random in [0, 1]^3
def sample_collection_points(N):
x = np.random.rand(N, 1)
y = np.random.rand(N, 1)
t = np.random.rand(N, 1)
return x, y, t
# 2 Sample boundary points (x=0 or 1, or y = 0 or 1)
def sample_boundary_points(N):
assert N%4 == 0, "N must be divisible by 4"
quarter = N//4
x = np.vstack([
np.zeros((quarter, 1)), # x = 0 edge
np.ones((quarter, 1)), # x = 1 edge
np.random.rand(quarter, 1), # x varies (for y=0 & y=1 edges)
np.random.rand(quarter, 1)
])
y = np.vstack([
np.random.rand(quarter, 1), # y varies on x=0 edge
np.random.rand(quarter, 1), # y varies on x=1 edge
np.zeros((quarter, 1)), # y = 0 -> bottom edge
np.ones((quarter, 1)) # y = 1 -> top edge
])
t = np.random.rand(N, 1)
return x, y, t
# 3 Sample initial condition points (t = 0)
def sample_initial_points(N):
x = np.random.rand(N, 1)
y = np.random.rand(N, 1)
t = np.zeros((N, 1))
return x, y, t
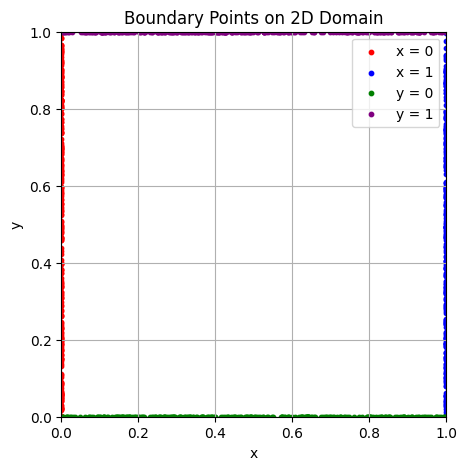
Visualizing Boundary Points
We sample points on the spatial boundaries of the square domain \( [0,1]^2 \). Each boundary (left, right, top, bottom) is shown in a different color. These points will be used to enforce the boundary condition \( u = 0 \) during training.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
# Visualize boundary point distribution
def plot_boundary_points(x, y):
#x = x.ravel()
#y = y.ravel()
plt.figure(figsize=(5,5))
N = len(x)
# Four groups of N/4 each
plt.scatter(x[:N//4], y[:N//4], c='red', label='x = 0', s=10)
plt.scatter(x[N//4:N//2], y[N//4:N//2], c='blue', label='x = 1', s=10)
plt.scatter(x[N//2:3*N//4], y[N//2:3*N//4], c='green', label='y = 0', s=10)
plt.scatter(x[3*N//4:], y[3*N//4:], c='purple', label='y = 1', s=10)
plt.xlabel('x')
plt.ylabel('y')
plt.title('Boundary Points on 2D Domain')
plt.legend()
plt.grid(True)
plt.axis('square')
plt.xlim(0, 1)
plt.ylim(0, 1)
plt.show()
# Sample and plot
x_bc, y_bc, t_bc = sample_boundary_points(1000)
plot_boundary_points(x_bc, y_bc)
x_bc.shape, y_bc.shape
1
((1000, 1), (1000, 1))
Tensor Preparation & Initial Condition
We now:
- Convert all sampled points from NumPy to PyTorch tensors
- Enable gradient tracking so we can compute derivatives later (needed for PDE loss)
- Compute the initial condition values using the known expression:
This will be used to compute the loss against the network’s prediction at ( t = 0 ).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
# Convert to PyTorch tensors (with gradient tracking)
def to_tensor(*arrays):
return [torch.tensor(a, dtype=torch.float32, requires_grad=True).to(device) for a in arrays]
# Sample data
N_int = 10000
N_bc = 1000
N_ic = 1000
x_int, y_int, t_int = sample_collection_points(N_int)
x_bc, y_bc, t_bc = sample_boundary_points(N_bc)
x_ic, y_ic, t_ic = sample_initial_points(N_ic)
# Convert to torch tensor
X_int, Y_int, T_int = to_tensor(x_int, y_int, t_int)
X_bc, Y_bc, T_bc = to_tensor(x_bc, y_bc, t_bc)
X_ic, Y_ic, T_ic = to_tensor(x_ic, y_ic, t_ic)
# Ground truth initial conditions: u(x,y, 0) = sin(pi * x) * sin(pi * y)
U_ic_true = (torch.sin(np.pi * X_ic) * torch.sin(np.pi * Y_ic)).detach()
Physics-Informed Loss (PDE Residual)
This function computes the residual of the heat equation at interior (collocation) points:
\[\mathcal{R}(x, y, t) = \frac{\partial u}{\partial t} - \alpha \left( \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} \right)\]We:
- Use PyTorch autograd to compute the needed derivatives
- Stack \( x, y, t \) as input and evaluate the model
- Return the mean squared residual as the physics loss
This encourages the network to produce solutions that obey the PDE.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
# Physics Loss (PDE residual)
def physics_loss(model, x, y, t, alpha):
# Ensure gradients are computed (Important)
x.requires_grad_(True)
y.requires_grad_(True)
t.requires_grad_(True)
inputs = torch.cat([x, y, t], dim=1) # shape: [N, 3]
u = model(inputs)
# First derivatives
u_t = torch.autograd.grad(u, t, grad_outputs=torch.ones_like(u), create_graph=True)[0]
u_x = torch.autograd.grad(u, x, grad_outputs=torch.ones_like(u), create_graph=True)[0]
u_y = torch.autograd.grad(u, y, grad_outputs=torch.ones_like(u), create_graph=True)[0]
# Second derivatives
u_xx = torch.autograd.grad(u_x, x, grad_outputs=torch.ones_like(u_x), create_graph=True)[0]
u_yy = torch.autograd.grad(u_y, y, grad_outputs=torch.ones_like(u_y), create_graph=True)[0]
# PDE residual
residual = u_t - alpha * (u_xx + u_yy)
return torch.mean(residual**2)
Training the PINN
We train the neural network using a combination of three loss terms:
- Physics loss: encourages the solution to satisfy the heat equation at interior points
- Initial condition loss: ensures the predicted solution matches the known initial state
- Boundary condition loss: forces the solution to be zero at the domain boundaries
The total loss is:
\[\mathcal{L} = \mathcal{L}_{\text{PDE}} + \mathcal{L}_{\text{IC}} + \mathcal{L}_{\text{BC}}\]We use the Adam optimizer and train for 5000 epochs.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
# Params
alpha = 0.01
layers = [3] + [128]*3 + [1]
model = FCNet(layers).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3)
epochs = 2001
for epoch in range(epochs):
optimizer.zero_grad()
# Physics loss
loss_pde = physics_loss(model, X_int, Y_int, T_int, alpha)
# Boundary Condition Loss
Xb = torch.cat([X_ic, Y_ic, T_bc], dim=1)
u_bc_pred = model(Xb)
loss_bc = torch.mean(u_bc_pred**2)
# Initial Condition Loss
Xi = torch.cat([X_ic, Y_ic, T_ic], dim=1)
u_ic_pred = model(Xi)
loss_ic = torch.mean((u_ic_pred - U_ic_true)**2)
# Total loss
loss = loss_pde + loss_bc + loss_ic
loss.backward()
optimizer.step()
if epoch % 100 == 0 or epoch == epoch - 1:
print(f"Epoch {epoch:4d} | Total: {loss.item():.2e} | PDE: {loss_pde.item():.2e} | IC: {loss_ic.item():.2e} | BC: {loss_bc.item():.2e}")
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Epoch 0 | Total: 2.72e-01 | PDE: 2.49e-03 | IC: 2.69e-01 | BC: 9.12e-04
Epoch 100 | Total: 1.55e-01 | PDE: 9.78e-03 | IC: 1.11e-01 | BC: 3.48e-02
Epoch 200 | Total: 1.11e-01 | PDE: 9.85e-03 | IC: 4.74e-02 | BC: 5.32e-02
Epoch 300 | Total: 1.06e-01 | PDE: 1.23e-02 | IC: 4.21e-02 | BC: 5.16e-02
Epoch 400 | Total: 1.04e-01 | PDE: 1.29e-02 | IC: 4.38e-02 | BC: 4.75e-02
Epoch 500 | Total: 1.04e-01 | PDE: 1.30e-02 | IC: 4.11e-02 | BC: 4.96e-02
Epoch 600 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.13e-02 | BC: 4.91e-02
Epoch 700 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.07e-02 | BC: 4.94e-02
Epoch 800 | Total: 1.07e-01 | PDE: 1.11e-02 | IC: 2.79e-02 | BC: 6.82e-02
Epoch 900 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.05e-02 | BC: 4.95e-02
Epoch 1000 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.04e-02 | BC: 4.94e-02
Epoch 1100 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.03e-02 | BC: 4.94e-02
Epoch 1200 | Total: 1.03e-01 | PDE: 1.30e-02 | IC: 3.96e-02 | BC: 5.01e-02
Epoch 1300 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.02e-02 | BC: 4.94e-02
Epoch 1400 | Total: 1.03e-01 | PDE: 1.31e-02 | IC: 4.01e-02 | BC: 4.93e-02
Epoch 1500 | Total: 1.03e-01 | PDE: 1.32e-02 | IC: 4.01e-02 | BC: 4.93e-02
Epoch 1600 | Total: 1.02e-01 | PDE: 1.32e-02 | IC: 4.00e-02 | BC: 4.93e-02
Epoch 1700 | Total: 1.03e-01 | PDE: 1.39e-02 | IC: 4.37e-02 | BC: 4.52e-02
Epoch 1800 | Total: 1.02e-01 | PDE: 1.31e-02 | IC: 4.00e-02 | BC: 4.93e-02
Epoch 1900 | Total: 1.02e-01 | PDE: 1.31e-02 | IC: 3.99e-02 | BC: 4.94e-02
Epoch 2000 | Total: 1.02e-01 | PDE: 1.31e-02 | IC: 3.99e-02 | BC: 4.94e-02
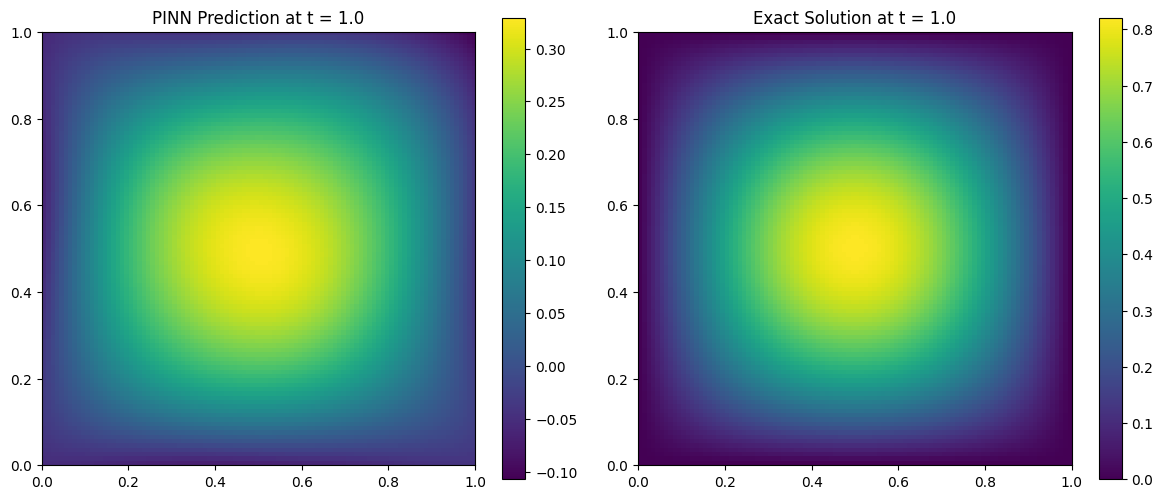
Comparing PINN Prediction vs Exact Solution
We now evaluate the trained PINN at a snapshot in time (e.g., ( t = 0.5 )) and compare it to the analytical solution:
\[u(x, y, t) = \sin(\pi x)\sin(\pi y)e^{-2\pi^2 \alpha t}\]We visualize both the predicted and exact solutions on the domain ( [0, 1]^2 ).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
# Evaluation function
def evaluate(model, alpha, t_eval=1.0):
x = y = np.linspace(0, 1, 100)
X_grid, Y_grid = np.meshgrid(x, y)
T_grid = np.full_like(X_grid, t_eval)
# Stack into (N, 3) tensor
X_test = torch.tensor(
np.stack([X_grid.ravel(), Y_grid.ravel(), T_grid.ravel()], axis=-1),
dtype=torch.float32
).to(device)
# Predict
with torch.no_grad():
u_pred = model(X_test).cpu().numpy().reshape(100, 100)
# Exact solution
u_exact = np.sin(np.pi * X_grid) * np.sin(np.pi * Y_grid) * np.exp(-2 * np.pi**2 * alpha * t_eval)
# Plotting
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.imshow(u_pred, origin='lower', extent=[0, 1, 0, 1], cmap='viridis')
plt.title(f"PINN Prediction at t = {t_eval}")
plt.colorbar()
plt.subplot(1, 2, 2)
plt.imshow(u_exact, origin='lower', extent=[0, 1, 0, 1], cmap='viridis')
plt.title(f"Exact Solution at t = {t_eval}")
plt.colorbar()
plt.tight_layout()
plt.show()
1
2
evaluate(model, alpha, t_eval=1.0)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
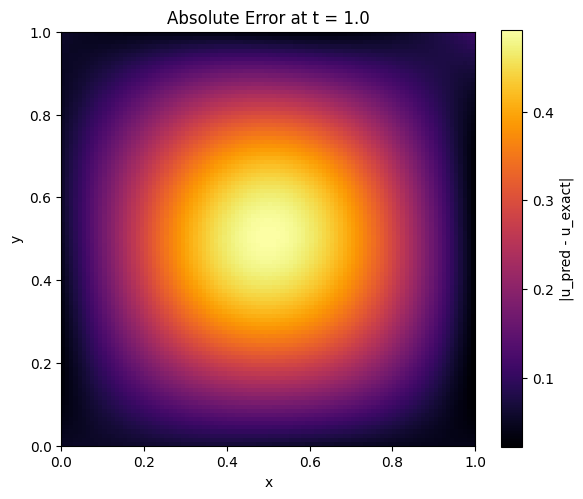
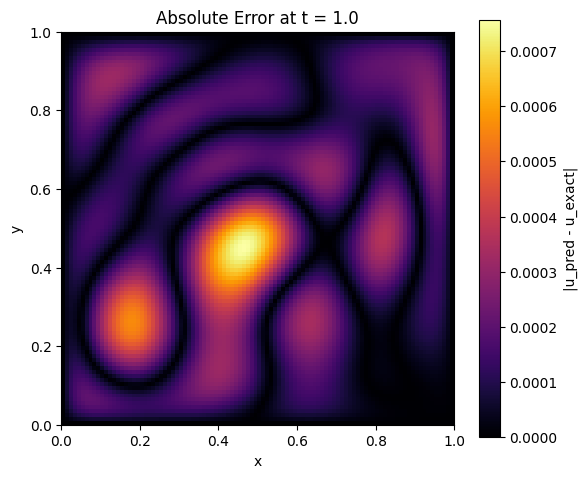
def error_visualization(model, alpha=0.01, t_eval=0.5):
x = y = np.linspace(0, 1, 100)
X_grid, Y_grid = np.meshgrid(x, y)
T_grid = np.full_like(X_grid, t_eval)
X_test = torch.tensor(
np.stack([X_grid.ravel(), Y_grid.ravel(), T_grid.ravel()], axis=-1),
dtype=torch.float32
).to(device)
with torch.no_grad():
u_pred = model(X_test).cpu().numpy().reshape(100, 100)
u_exact = np.sin(np.pi * X_grid) * np.sin(np.pi * Y_grid) * np.exp(-2 * np.pi**2 * alpha * t_eval)
abs_error = np.abs(u_pred - u_exact)
plt.figure(figsize=(6, 5))
plt.imshow(abs_error, origin='lower', extent=[0, 1, 0, 1], cmap='inferno')
plt.title(f'Absolute Error at t = {t_eval}')
plt.colorbar(label='|u_pred - u_exact|')
plt.xlabel('x')
plt.ylabel('y')
plt.tight_layout()
plt.show()
# Example usage
error_visualization(model, alpha, t_eval=1.0)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
from matplotlib import animation
def animate_solution(model, alpha=0.01, timesteps=20):
x = y = np.linspace(0, 1, 100)
X_grid, Y_grid = np.meshgrid(x, y)
fig, ax = plt.subplots(figsize=(6, 5))
img = ax.imshow(np.zeros_like(X_grid), origin='lower', extent=[0,1,0,1], vmin=0, vmax=1, cmap='viridis')
plt.colorbar(img, ax=ax)
#ax.set_title("PINN Prediction Over Time")
def update(frame):
t_val = frame / (timesteps - 1)
T_grid = np.full_like(X_grid, t_val)
X_test = torch.tensor(
np.stack([X_grid.ravel(), Y_grid.ravel(), T_grid.ravel()], axis=-1),
dtype=torch.float32
).to(device)
with torch.no_grad():
u_pred = model(X_test).cpu().numpy().reshape(100, 100)
img.set_data(u_pred)
ax.set_title(f"PINN Prediction Over Time t = {t_val:.2f}")
return [img]
ani = animation.FuncAnimation(fig, update, frames=timesteps, interval=200)
plt.close()
return ani
# Run in Jupyter to display:
ani = animate_solution(model, alpha)
from IPython.display import HTML
HTML(ani.to_jshtml())
1
error_visualization(model_Hard, alpha, t_eval=1.0)
1